

Magnetic Drive Wheel for Wall Climbing Robot



Description
Reviews
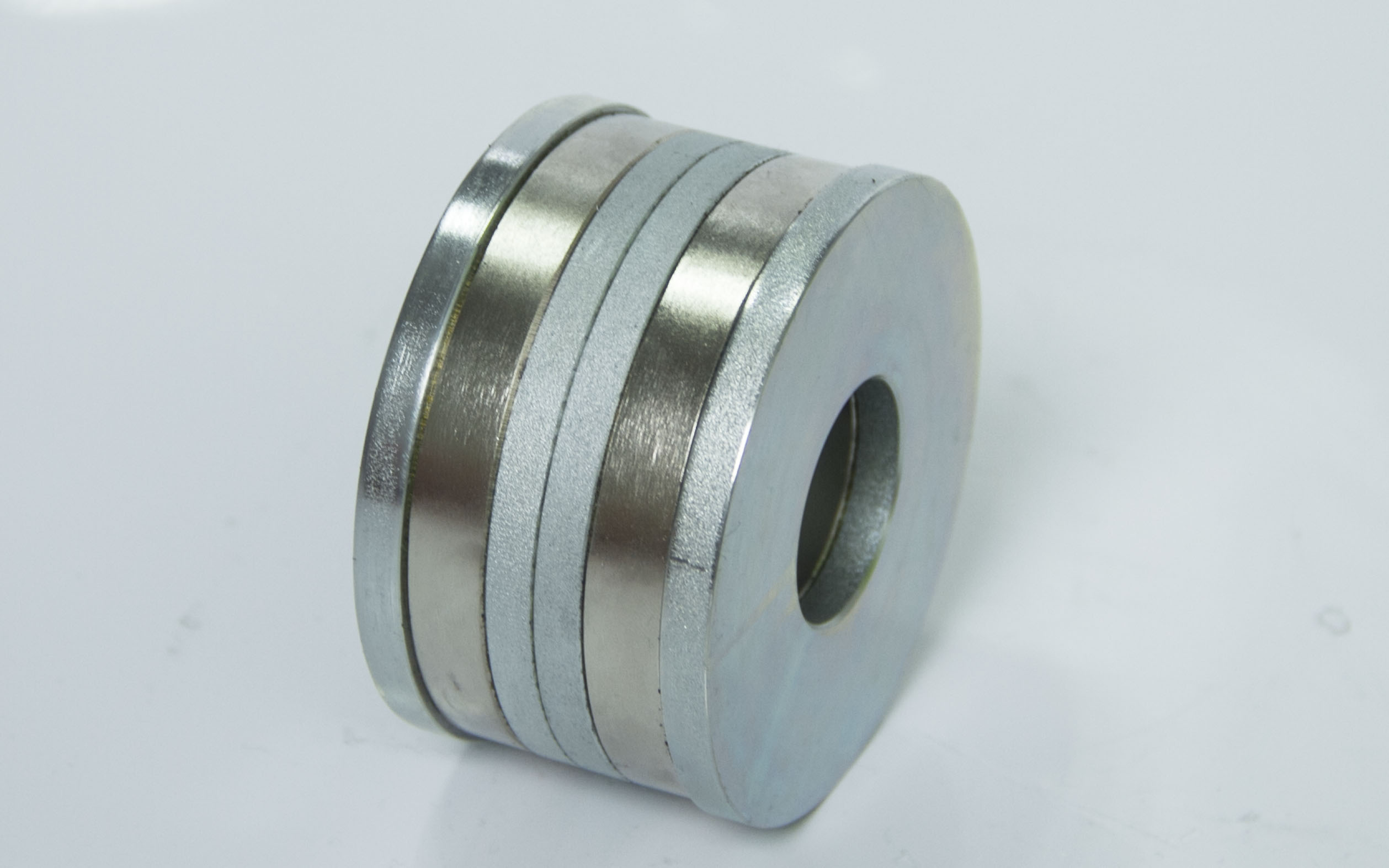
Magnetic Drive Wheel for Wall Climbing Robot
Material: 20# Steel + Neodymium Magnet
Magnetization Direction: Axially, repelling each assembly
Attraction Surface: Curved Surface
Application: Wall climbing robot
Description
Magnetic wall and ceiling climbing robots have been proposed in many industrial applications where robots must move over ferromagnetic material surfaces. The magnetic circuit design with magnetic attractive force calculation of permanent magnetic wheel plays an important role which significantly affects the system reliability, payload ability and power consumption of the robot. This wall climbing robot with four permanent magnetic wheels is proposed to climb along the vertical wall and overhead ceiling of steel cargo containers as part of an illegal contraband inspection system. The permanent magnetic wheels are designed to apply to the wall and ceiling climbing robot.
Test result:
-
One magnetic drive wheel use its curved surface to adsorb on a round tube, the force is 130kgs.
-
Application: Wall Climbing Robot, It can be used to detect pipeline interior, ship surface, large steel bridge, oil and gas pipeline, and carry repair tools to repair defects.
Advantage:
-
It has a strong adsorption capacity and is able to move on ferromagnetic material surfaces.
-
Simple structure, beautiful appearance, low production cost.
Application:
The forces have been determined at room temperature on a plate in polished steel (S235JR according to DIN 10 025) with a thickness of 10 mm (1kg ~10N). Under normal test condition, the measured force is not lower than the specified value. Value is exceeded in general. Depending on the type of application (installation situation, temperatures, counter anchor etc.) the forces can be influenced enormously. The indicated values are serving as an orientation. Please get advice and help from our experts.
